※読んだ本の一部を紹介します。
※そのままの文章ではありませんが、試し読みする感覚でお楽しみください。
はじめに
2008年には、ロボットによる演劇の制作にも関わりました。ロボットと人間の訳者がともに舞台で演じるのです。その演劇を観た人たちが、ロボットに心を感じたと感想を述べました。
私自身も、演じているロボットに心を感じたのです。「ロボットは、人間の心までも映し出す鏡である」と改めて感じました。
目次
書籍情報
タイトル
ロボットとは何か
人の心を映す鏡
発行者 鈴木哲
発行 (株)講談社
ブックデザイン 中島英樹
印刷 凸版印刷(株)
製本 (株)大進堂
本文データ作成 (株)DNPユニプロセス
著者
石黒浩
大阪大学大学院基礎工学研究科システム創成専攻教授。工学博士。
知能ロボットと知覚情報基盤の研究開発を行い、次世代の情報・ロボット基盤の実現を目指しています。
人間酷似型ロボット研究の第一人者です。地震をモデルにした遠隔操作型アンドロイドは世界中の注目を集めました。
出版
講談社現代新書
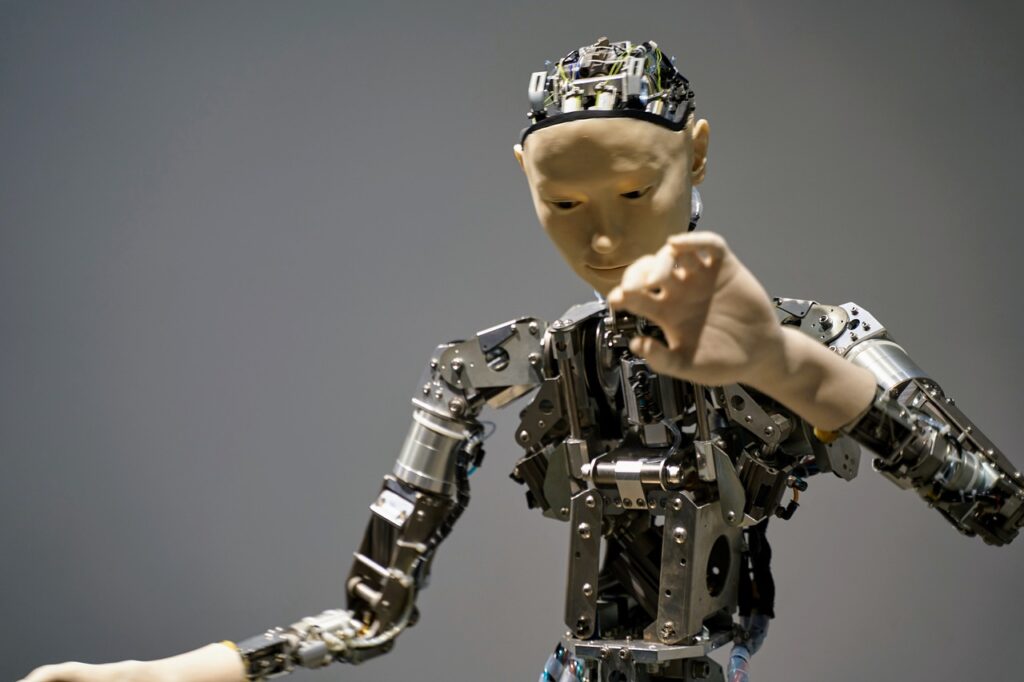
人間らしい動き
不気味の谷
人の顔を認識する際に、人間と人間以外のものを区別機能が働くはずです。人間には敏感に反応するが、人間と少し違うもの、人間らしい姿形をしながらロボットのように動くものに対しては、非常にネガティブな反応を示します。
この不気味の谷を克服するには、可能な限り人間らしい動きをするアンドロイドを開発すれば良いと思ったのです。
人間のような自然な動きを再現するために、特に工夫をしたのが肩の動きになります。人間の肩の関節は、肩胛骨によりその位置が変わるようになっているのです。その肩胛骨の機構を再現するために、4つのアクチュエータを埋め込み、息をするたび肩が上下するという人間特有の動きを再現できるようになりました。
日本人の平均顔モデルの女性アンドロイドでは、空気圧アクチュエータは全身で43本使用しました。埋め込んだ場所は腰から上の部分です。着座姿勢において、人間らしい振る舞いができるようになりました。特に表情や目の動きなどの再現にこだわっています。
空気圧アクチュエータは人間の筋肉のような性質をもっていて、送り込む空気の圧力の強さによって動く速度が変わります。ゆえに、触っても人間のような感触があるアンドロイドが生まれたのです。
ジェミノイドを突かれると、
偽物のパパ
12歳の娘と、ジェミノイド(石黒教授に酷似したアンドロイド)で簡単なゲームや言葉遊びをする実験を行いました。
娘はもちろんジェミノイドをみて、ロボットであることをすぐに理解しましたが、普通に会話ができたのです。
私本人と会話するときと、ジェミノイドと会話するときで、ほとんど差がありません。娘がどう思っているかはわかりませんが、ジェミノイドを受け入れられる可能性は高いです。
冗談ですが、もう少しこの実験を繰り返せば、家にジェミノイドを置いておけば、私は家に帰る必要がないかもしれません。
ジェミノイドと訪問者との対話が5分ほど続くと、操作する者はジェミノイドの体が自分の体であるかのような錯覚を覚えるようになります。
ジェミノイドを通した対話を続けて、操作者がジェミノイドの体に適応した頃を見計らい、ジェミノイドを突いてみました。すると、操作者も本当に自分の頬を突かれたような感覚をもったのです。
センサーを搭載しているわけではなく、操作者はモニタを見ながらしゃべっているだけです。
この頬を突かれる体験は非常に屈辱的になります。なかには本当に「やめてくれ」と声を出してしまう操作者もいました。体が動かないのをいいことにいたぶられている感じがしてしまうのです。
性的情動と知的情動
性的情動
すべての動物が種の存続のために持つ欲求です。
人間も、裸の男女を1カ月ほど1つの部屋に住まわせて十分な食事を与えれば、必ず性交するといわれています。
性交の相手を絶対的な基準で選ぶのではなく、状況に合わせて選択しているに過ぎないのです。
人間が他の動物と子なるのは、大脳の発達により、知的好奇心を持つようになったことです。
もちろん、知的情動の根本にも性的なものはあるのでしょうが、ときに知的情動のみで人と関わりを持ちたいという気持ちを誘発します。
問題はロボットです。ロボットにも情動レベルの機能が必要でしょうか。ロボットの場合、普通はその活動の場と役割があらかじめ与えられています。プログラム通りに働けばよいのです。
しかし、ロボットが今よりも深く人間と関わるのであれば、情動が組み込まれる必要があるでしょう。ロボットが人間社会に受け入れられ、人間になくてはならない存在になるためには、人のようになる必要があるのです。
昆虫ロボットの応用

昆虫ロボットのアクティビティ
昆虫ロボットのアクティビティは、餌をとるための行動を再現することです。餌の匂いが遠い場合は大きくデタラメに動きます。偶然に餌に近づけば、小さくデタラメに動くようになるのです。この行動を繰り返していけば、ロボットは餌にありつくことができます。
我々は、人間の腕のコネの構造と筋肉の配置を模倣した、非常に複雑な腕ロボットを開発しました。実際に、腕一本作るために、26本の人口筋肉を使っているのです。
この腕ロボットの問題は、肘の関節を曲げようにも、複数の筋肉が複雑に繋がっているために、どの筋肉をどのように動かせばいいのか分からないことにあります。
従来のロボットのようにモーターを1つ動かせば、曲がるといったような簡単な制御ができません。
腕ロボットに、昆虫ロボットと同じように、大きくゆらぐ戦略を用いると、ちゃんと制御できるようになるのです。腕ロボットの場合のアクティビティは、手先と目標の距離になります。この距離は刺客センサーなどで直接計測することが可能です。
人間らしいロボットを作ろうとして、表面的に人間に似せる研究から、生体の原理を探る研究に深化してきたと思っています。
感想
サイト管理人
かなり面白い書籍です。笑いを誘っているのではないと思ってしまいますが、著者は真面目に執筆しているのでしょう。
人に酷似したロボットが、人間に違和感を持たれないようにする技術が発展したら、あらゆる場面で活用できると思います。
人相手に、ずっと立っていなければならない受付の仕事などは、ロボットで良くなるかもしれません。アルバイトを募集しても来ないような窓口の仕事であれば、ロボットでの運用を採用する企業も出てきそうです。
ロボットのメンテなど、違った面で人件費がかかるかもしれませんが、普段の業務の量は減ることになります。
人によっては、家に帰らなくて良いという状況が、ロボットによって作りだされるのであれば、妻にとって夫にとって、快適に暮らせる場面があるのではないでしょうか。
ロボットが進化することで、生活が豊かになることを期待したいと思います。
購入リンク
紙


※amazonの商品リンクです。画像をクリックしてください。
電子


※amazonの商品リンクです。画像をクリックしてください。